ロボートの視覚制御

Nec マルチロボットコントローラ Iot Nec

特許技術を自社ロボットに組み込んで使える Algoza Library を販売開始 カメラ ロボットで手軽に高精度なロボット制御 が可能に チトセロボティクスのプレスリリース

立命館大学理工学部ロボティクス学科運動知能研究室 川村研究室

特開2017 226029 知財ポータル Ip Force
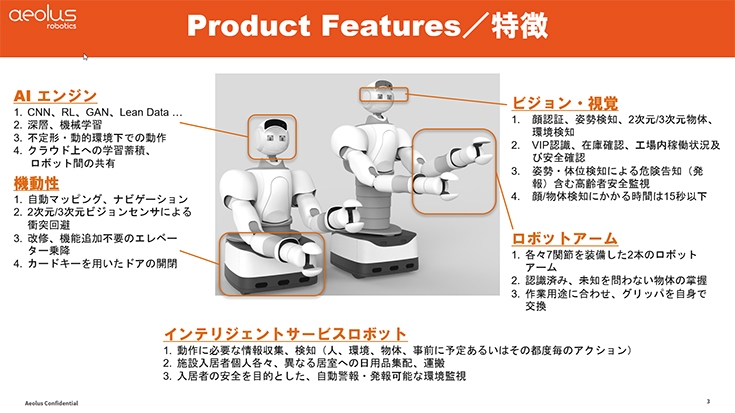
Ai搭載の介護支援ロボット アイオロス ロボット 徹底解説 エレベータに乗れて 作業に最適なロボットハンドを自分で交換する ロボスタ

Ppt 視覚フィードバックによるロボット制御理論 Powerpoint Presentation Id 5271587
7月1日開催 バイオミメティクス市民セミナー 第67回 視覚センシングとロボット制御の高度化 北海道大学総合博物館
ドコモとトヨタ ロボットのvr遠隔制御に成功 5g駆使 Mogura Vr


Ppt 視覚フィードバックによるロボット制御理論 Powerpoint Presentation Id 5271587

0 Response to "ロボートの視覚制御"
Post a Comment